
Micro-programmed Control - Control Memory, Control Address Register (CAR), Address Sequencing
Control Memory
Micro-program 의 전반적인 모습 및 구성요소

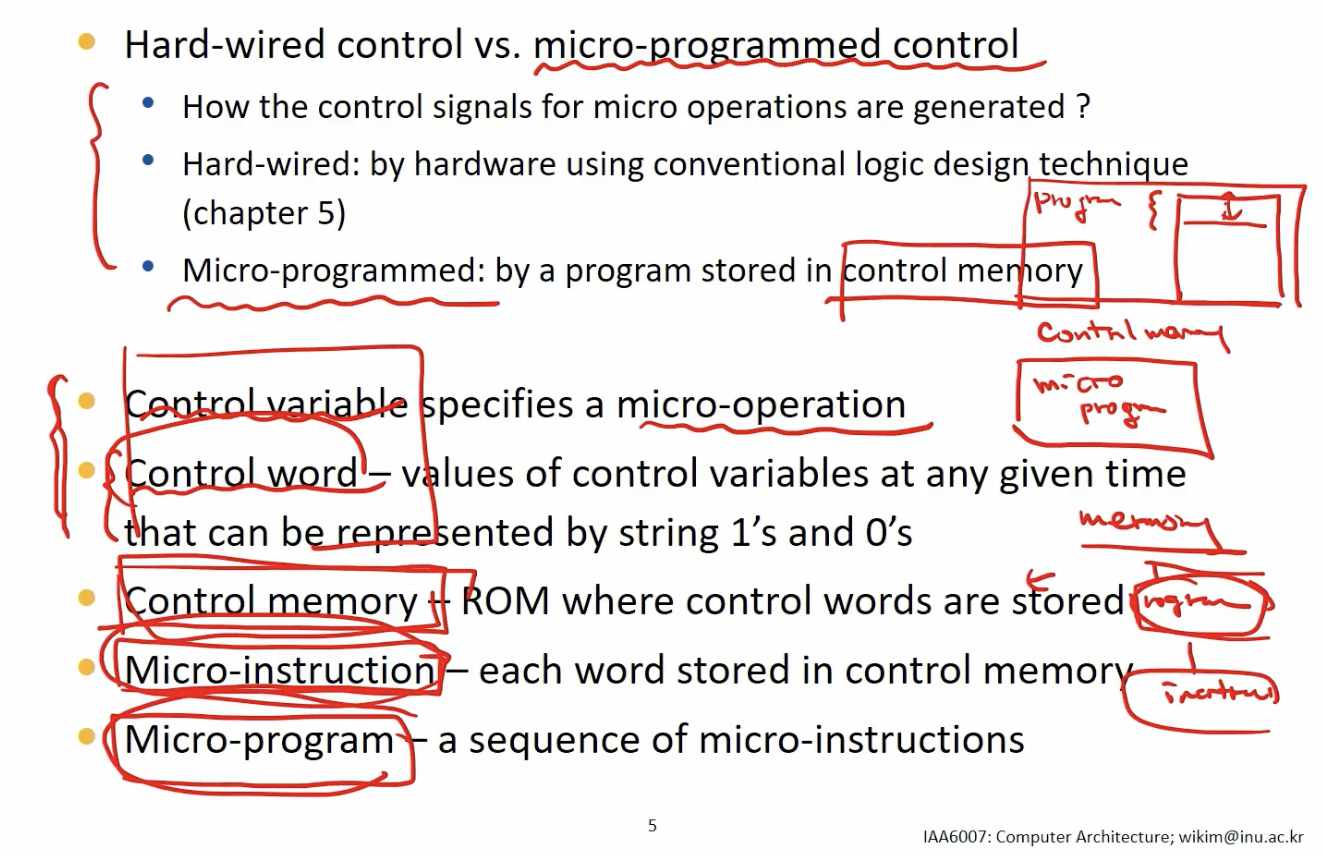
Hard-wired Control vs Micro-programmed Control
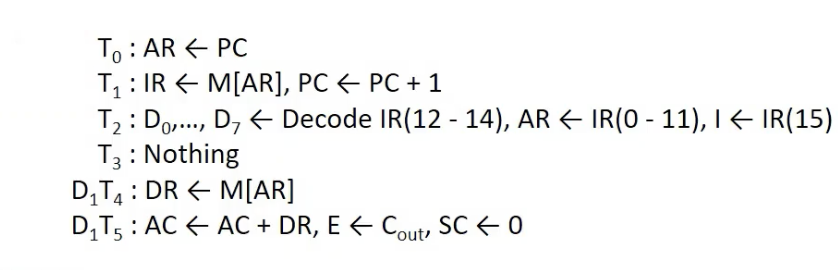
Hard-wired Control : 회로로서 Control 이 설계되어 있음.
- ADD 라는 Control 을 위해서 각 Timing signal (T_0 ~ T_5) 에 적절한 Micro-operation 을 수행하도록 회로를 설계.
모든 Control 이 Hardware 적으로 설계되어 있음.
Micro-programmed Control : Micro-program 에 의해 Control 이 설계됨.- Control 을 위한 Memory (Control Memory) 가 따로 존재.
- Control Memory : Micro-program 들이 적재되는 Memory.
- Micro-program 을 구성하는 각각의 명령어를 Micro-instruction 이라고 한다.
- Control Memory 내부에 존재하는 Micro-program 에 의해 각각의 명령어가 수행되도록 함.
- Control Memory 는 Control word 를 출력.
- Control word : 해당 Clock 에서 어떠한 Micro-operation 을 수행할지 선택하는 Control Signal 의 조합
- Control variable : Micro-operation 을 구체화하여 분류.
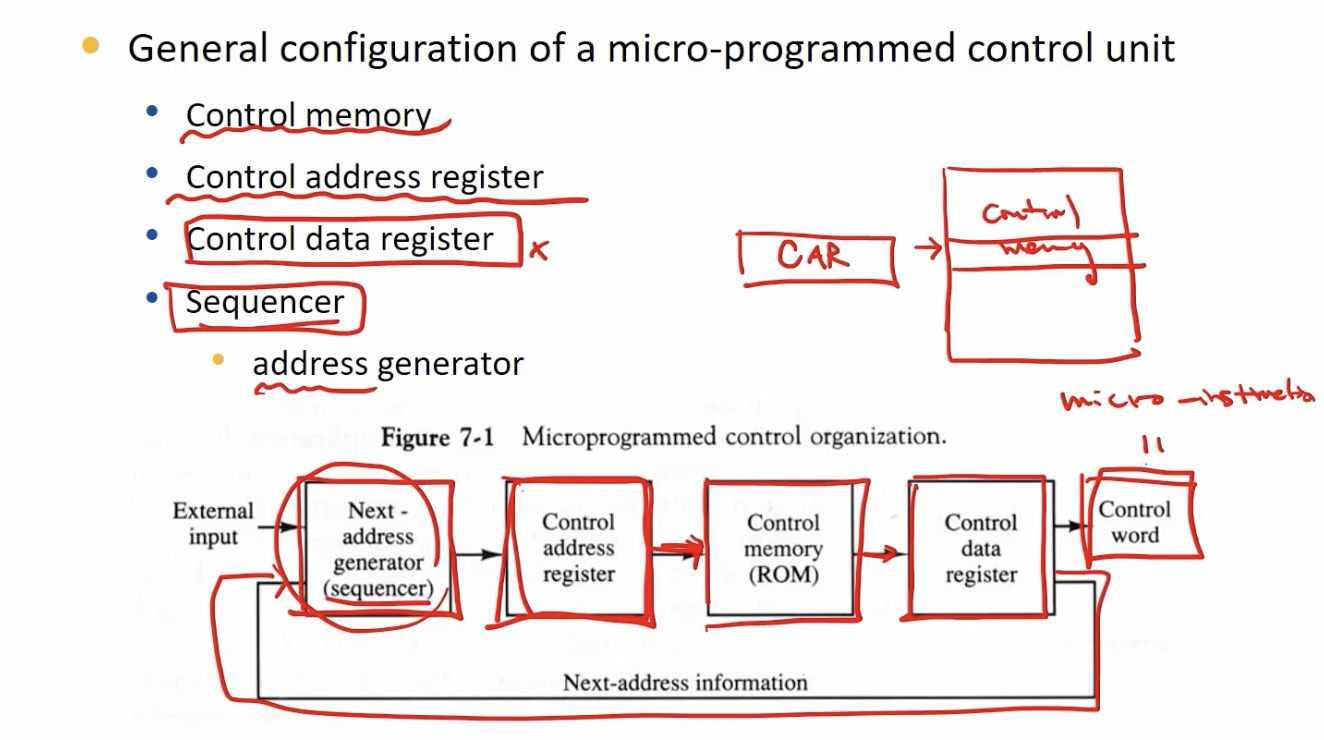
General Configuration of a Micro-programmed Control Unit
- Control Memory
- Cotrol 을 위한 Micro-program 들이 적재되어 있는 Memory
- Control Address Register (CAR)
- Control Memory 내부에 적재되어 있는 각 Micro-instruction 이 존재하는 주소를 가지고 있는 Register.
- 이전에 배운 AR 과 비슷한 기능을 함.
- 동작 과정
- Address Sequencer 에 의해 다음 실행할 Micro-instruction 의 주소가 결정.
- 해당 주소가 Control Address Register 에 저장됨.
- Control Memory 가 Control Address Register 에 저장되어 있는 주소를 참조하여 해당 주소에 저장되어 있는 Micro-instruction 을 Control Data Register 에 저장.
- Control Data Register 에 저장된 것이 곧 Control Word 로서 저장.
- 즉, Control word == Micro-operation
Address Sequencing
Micro-instruction 이 모여 Micro-program 이 되고, Micro-program 이 모여 Control Memory 를 구성한다.
- Address Sequencing :
- 이때 어떠한 Micro-instruction 을 수행하기 위해 해당 주소를 어떻게 지정할 것인지에 대한 전략.
Micro-program Routine
각각의 Micro-instruction 은 Micro-program Routine 을 가지고 있다.
- ADD 의 경우에는 NOP -> READ -> ADD 라는 Routine 을 가짐.
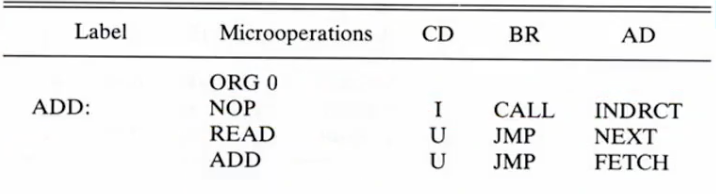
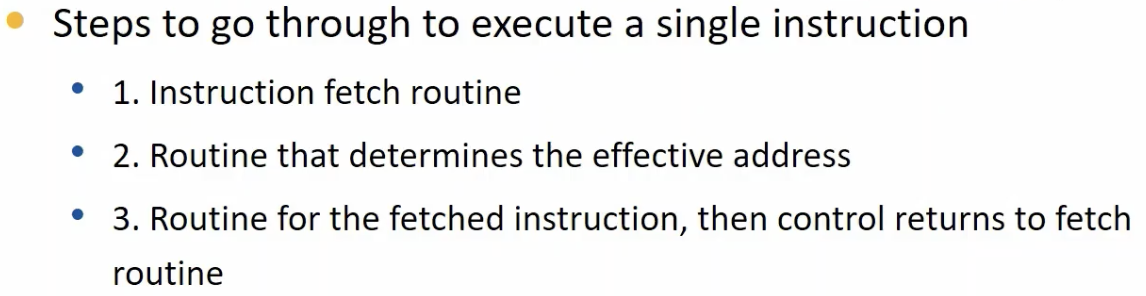
각 Micro-instruction 수행 과정
- FETCH
- 해당 명령어에 필요한 유효 주소 결정
- 명령어 실행 후 FETCH 로 돌아감
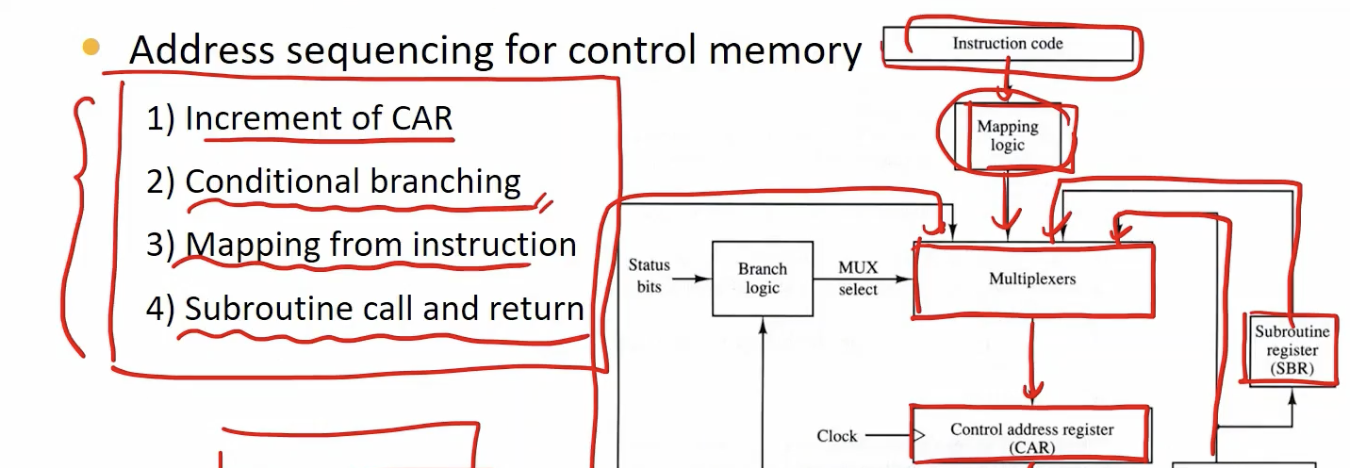
Address Sequencing : 4가지 방법
1. Increment of CAR
Program Counter 를 하나 증가시키는 것과 비슷한 원리.
- Control Memory 에 있는 Micro-program 을 순차적으로 수행.
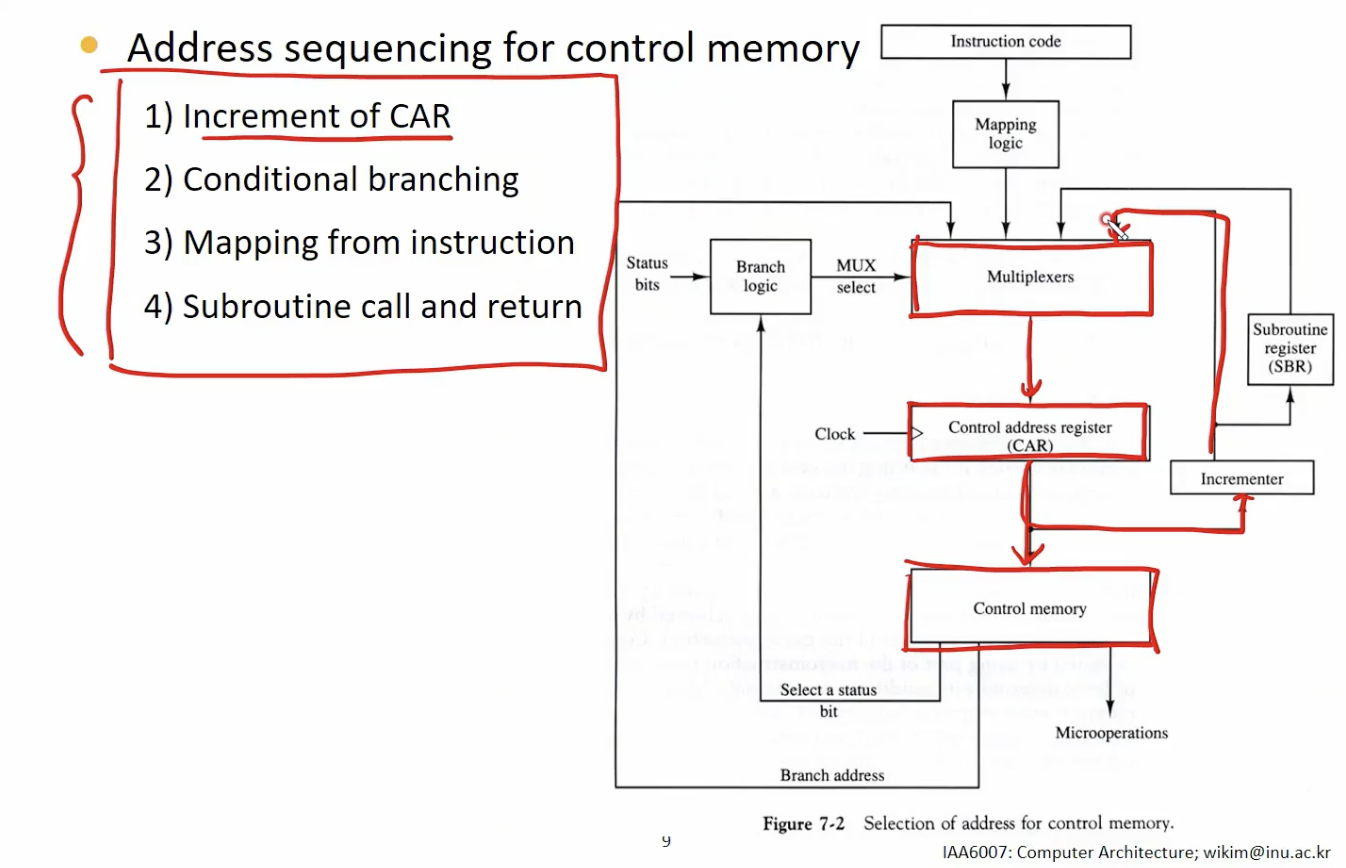
2. Conditional Branching
특정 명령어 수행 중 조건 충족 시 지정된 특정 명령어로 점프하는 것.
- Control Memory 에서 Branch address Line 을 통해 해당 주소를 CAR 에 저장.
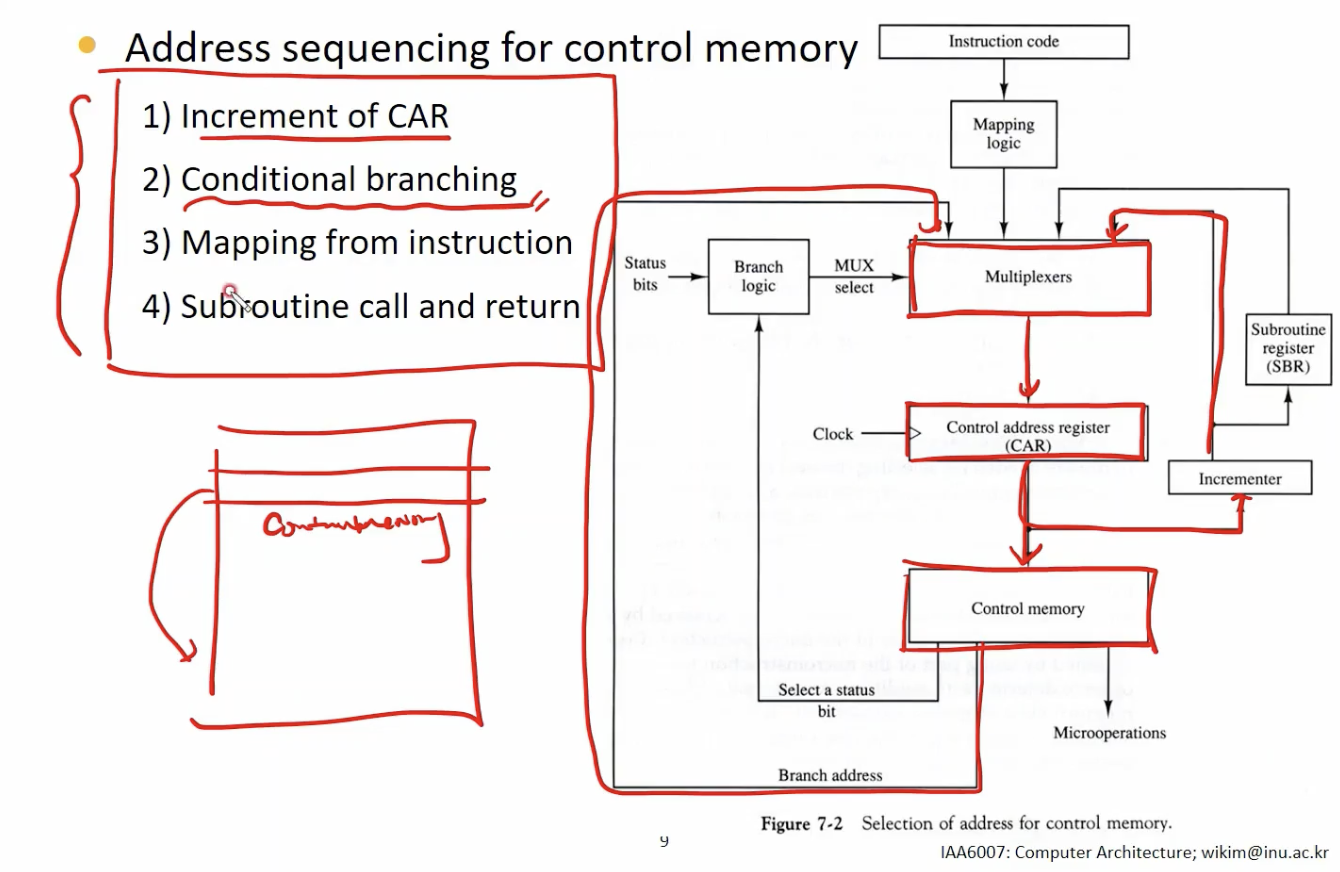
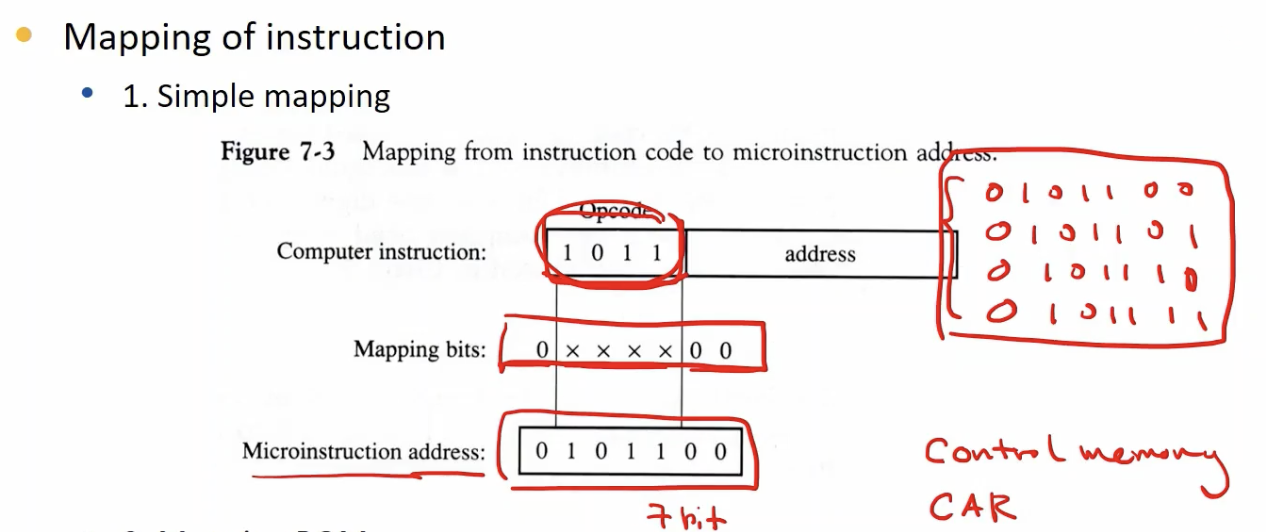
3. Mapping from Instruction
해당 명령어의 실행 첫 부분에 Control Memory 의 번지 수를 지정
- Micro-instruction 의 Code 일부분을 토대로 해당 Instruction 의 Address 로 변환하는 방법.
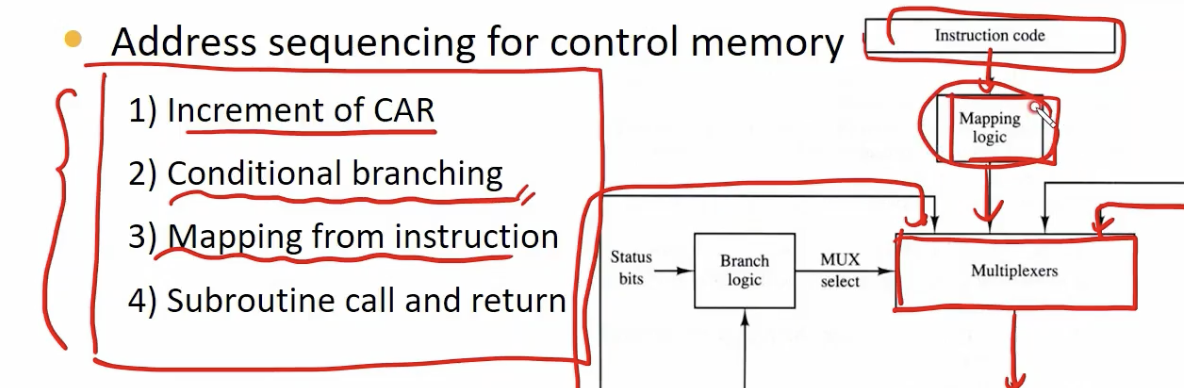
Control Memory, CAR 의 범위는 7 Bit 로 설정.
- Micro-instruction 의 Opcode (4 bit) 를 7 bit 로 변환해야 한다.
- 기존 Opcode 에 최상위 비트 0 1개, 하위 비트 0 2개를 추가.
- 이 경우 위 사진과 같이 하위 비트 경우의 수 만큼 해당 명령어의 주소 범위가 생성됨.
- 이렇게 생성된 Address 를 해당 명령어가 포함된 Routine 의 첫번째 주소로 지정.
4. Subroutine Call and Return
Conditional Branching 등에 의해 특정 명령어로 점프했을 경우 돌아올 주소를 Subroutine Register 에 저장.
- Subroutine Reguster 에 저장되어 있는 돌아올 주소를 꺼내 CAR 에 넣는 것.
지식 공유 및 기록을 위한 컴퓨터 구조 개인 학습 포스트입니다. 피드백은 항상 환영합니다! 긴 글 읽어주셔서 감사합니다.
Task Lists
- Control Memory
- Hard-wired Control vs Micro-programmed Control
- General Configuration of a Micro-programmed Control Unit
- Address Sequencing
- Micro-program Routine
- 각 Micro-instruction 수행 과정
- Address Sequencing : 4가지 방법
- 1. Increment of CAR
- 2. Conditional Branching
- 3. Mapping from Instruction
- 4. Subroutine Call and Return



Comments