
Micro-programmed Control - Example
Micro-programmed Control 예시
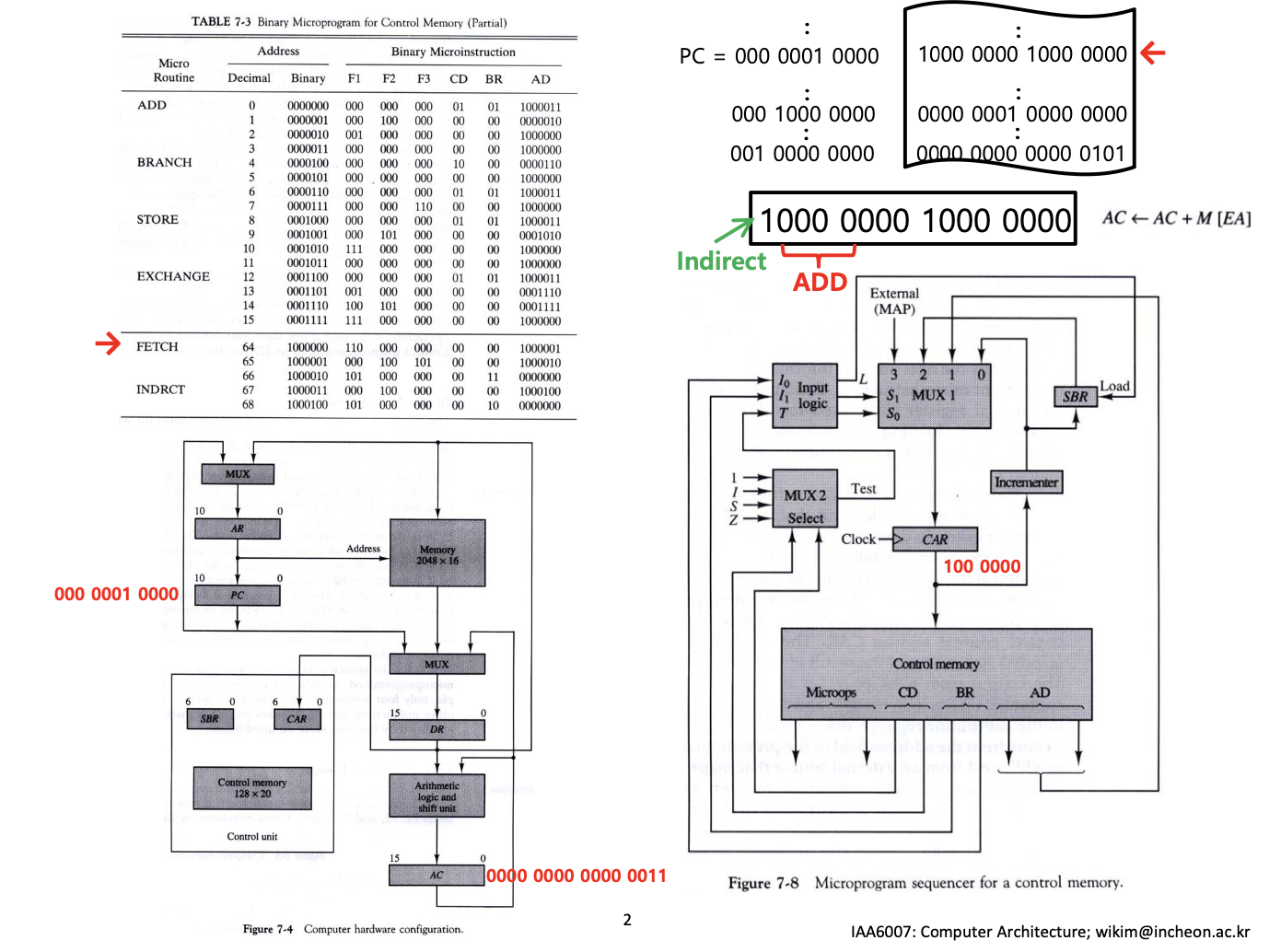
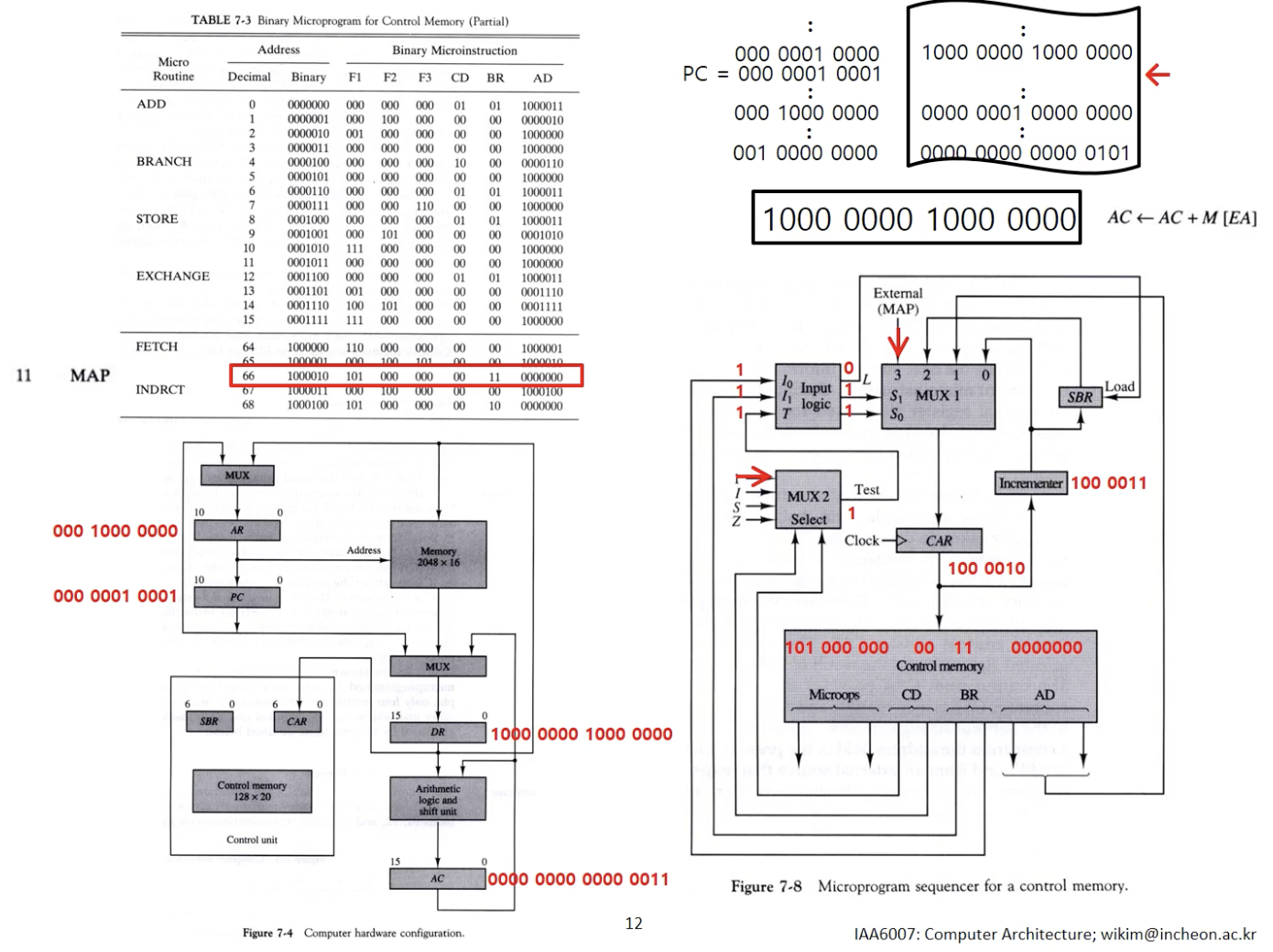
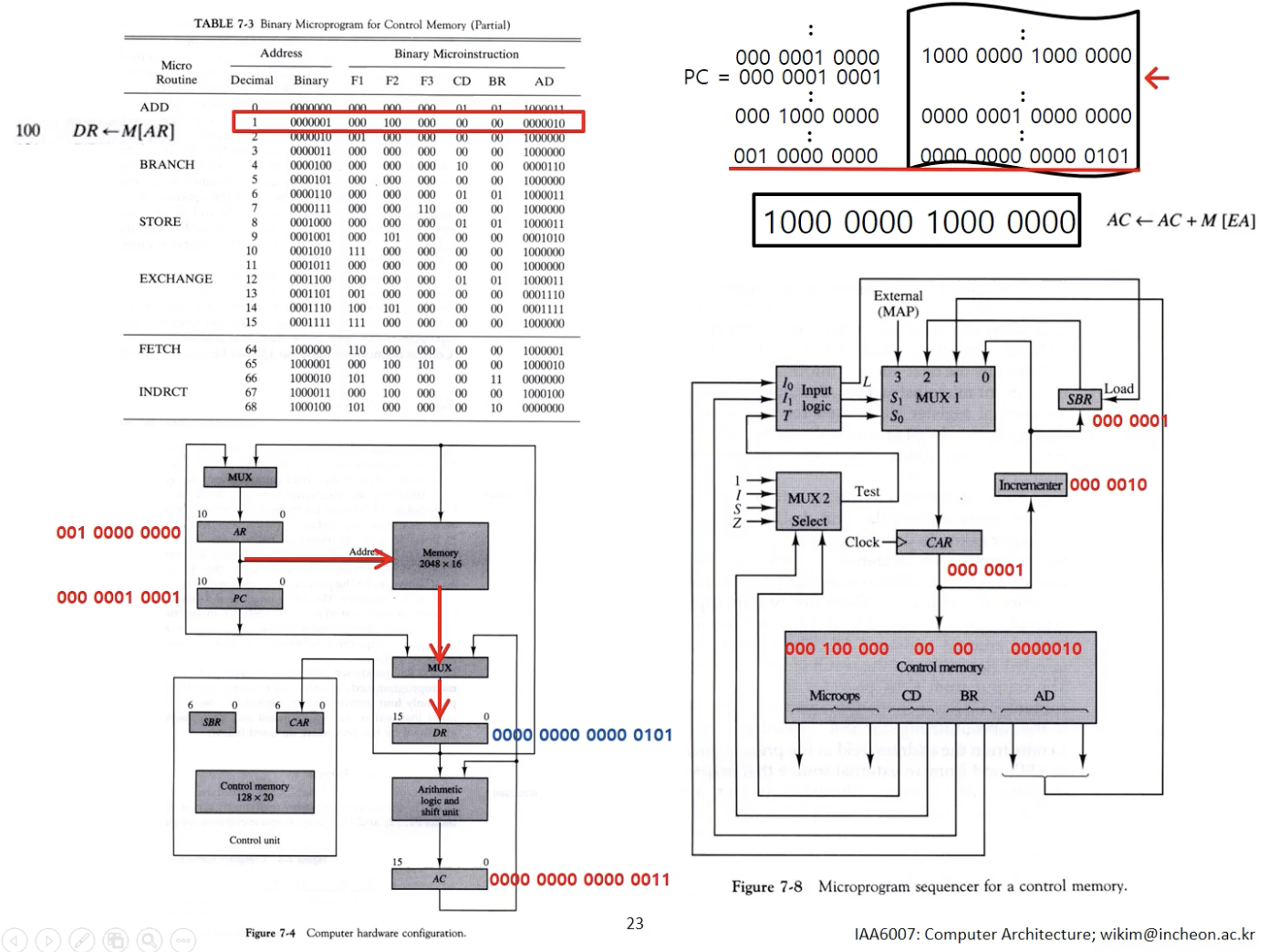
좌측 하단 회로: 전체 하드웨어 구조 / 우측 하단 회로: Control Unit 의 상세 구조
우측 상단 값: Memory 의 주소 - 저장된 값

1. Micro-program 분석
Memory 의 크기: 2048 x 16
- 명령어 : 1000 0000 1000 0000 (16-bit)
- I bit = 1 (1-bit)
- Opcode = 0000 (4-bit)
- Address = 000 1000 0000(11-bit)
- Memory 의 크기는 2^(address bit 크기) * 명령어의 bit 크기
- 2^11 * 16 = 2048 x 16 bit
AR, PC 의 크기: 명령어의 주소를 저장하므로 11 bit
DR, AC 의 크기: Data / 명령어 값을 가지는 Register - 16bit
Control Memory 의 크기
- Micro-instruction 의 크기를 20 bit 로 정의
- Microoperation(F1, F2, F3)
- 3 x 3 = 9-bit
- CD = 2-bit
- BR = 2-bit
- AD = 7-bit
- 따라서, 2^(AD) * 명령어의 bit 크기
- Control Memory 의 크기 : 2^7 * 20
2. Micro-program 명령어 수행 과정
- PC 값 확인을 통한 현재 실행해야 하는 명령어 파악
- PC = 000 0001 0000
- 실행해야 하는 명령어 : M[PC] = 1000 0000 1000 0000
- 명령어 구조 파악: 1000 0000 1000 0000
- I-bit = 1 (= Indirect)
- Opcode = 0000 (= ADD)
- AD = 000 1000 0000
- Indirect 주소(000 1000 0000)를 가진 ADD 명령어임.
- Indirect 주소인 000 1000 0000 에는 0000 0001 0000 0000 이 존재.
- 해당 값에 의해 실제 유효 주소는 001 0000 0000 임을 알 수 있음.
- 유효 주소인 001 0000 0000 에는 0000 0000 0000 0101 이 저장되어 있으며, 이는 ADD 의 피연산자 값이 된다.
- 명령어 수행
- ADD: AC <- AC + M[EA]
- AC = 3
- M[EA] (유효 주소에 저장된 값) = 0000 0000 0000 0101 = 5
- 따라서, AC 에는 3+5 연산 수행의 결과인 8이 저장됨.
- 명령어 수행 후: Always FETCH
- 모든 명령어는 수행 및 종료 후 CAR 에 FETCH 주소를 저장. (FETCH 단계로 이동)
- FETCH: 1000000 (64)
- 예: ADD 명령어의 마지막 Microoperation
- CD(00) BR(00) AD(1000000) = Unconditionally Jump to FETCH
- 따라서, 현재 CAR 에는 100 0000 이 저장되어 있음.
- 이후 FETCH 단계에서 다음 명령어를 가져오며 명령어 수행 반복.
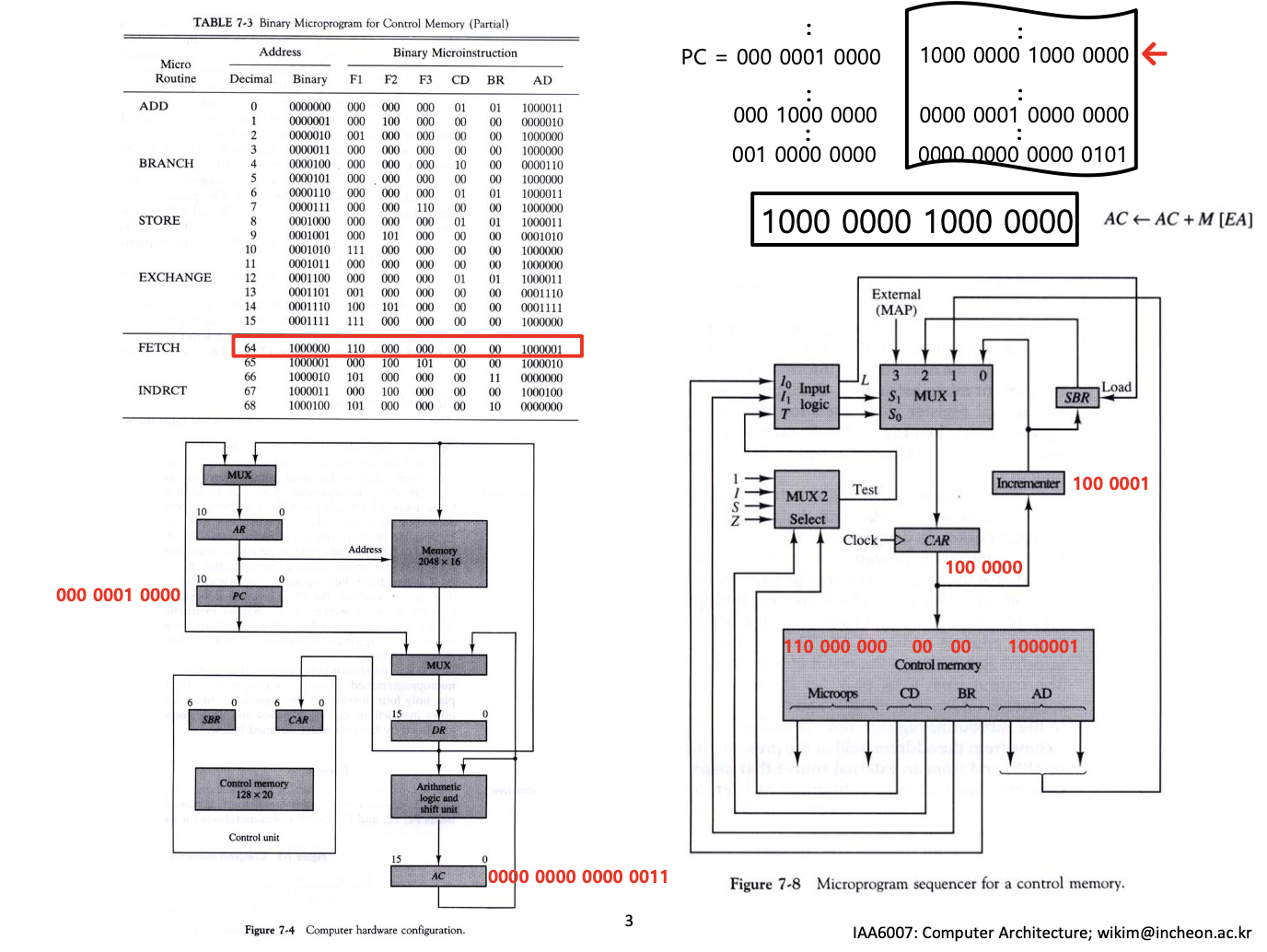
3. FETCH 단계부터 명령어 수행 과정
- FETCH(1) 수행: CAR = 100 0000
- Micro-instruction: 110 000 000 00 00 1000001
- Control memory 에 저장되어 수행됨.
- 동시에 CAR 에 연결된 Incrementer 가 CAR 값을 하나 증가.
- 다음 수행할 Micro-instruction 의 주소를 가지게 됨.
- Incrementer <- CAR + 1 = 100 0001 (65)
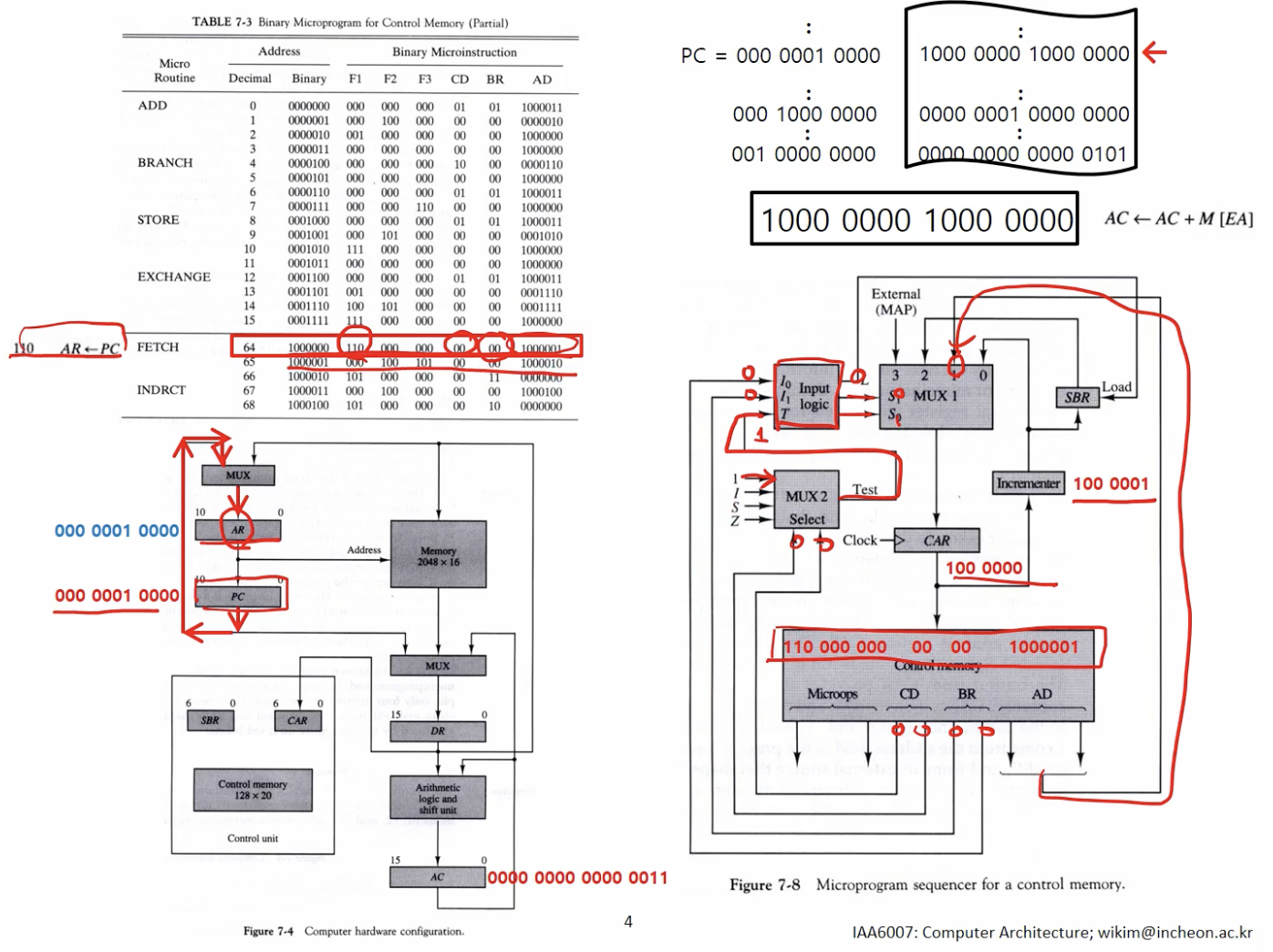
- F1, F2, F3 = 110, 000, 000
- 110 : AR <- PC
- 현재 PC 에 존재하던 000 0001 0000 이 AR 에 저장된다.
- CD = 00, BR = 00
- Unconditionally Jump (무조건 점프)
- AD = 1000001
- 따라서 1000001 번지로 점프하여 해당 Micro-instruction 을 수행한다.
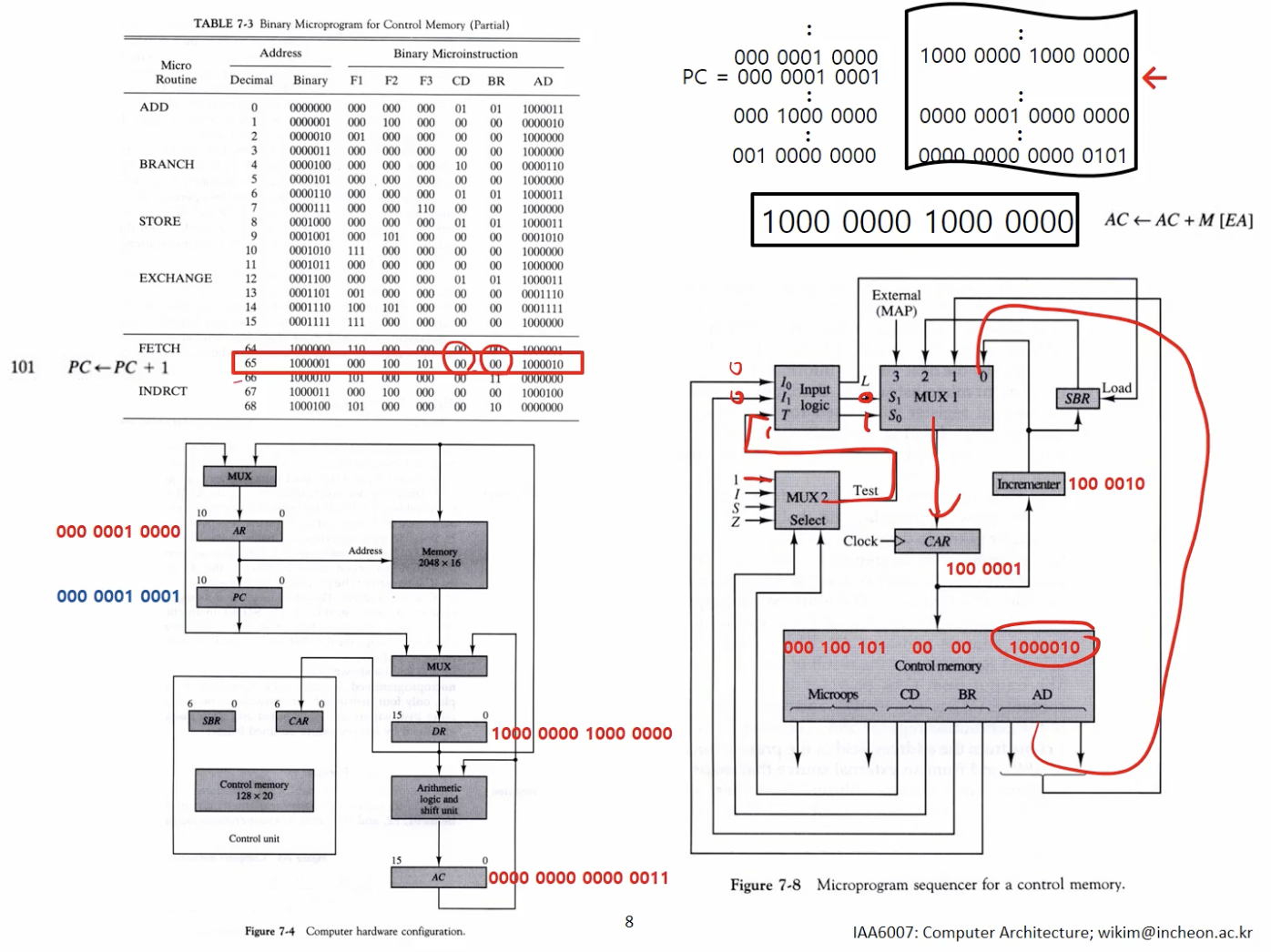
- FETCH(2) 1000001 번지의 Micro-instruction 수행
- Micro-instruction: 000 100 101 00 00 1000010
- F1, F2, F3 = 000, 100, 101
- F2 100 (Read) : DR <- M[AR]
- F3 101 (PC + 1): PC <- PC + 1
- CD = 00, BR = 00
- Unconditionally Jump (무조건 점프)
- AD = 1000010
- 따라서 1000010 번지로 점프하여 해당 Micro-instruction 을 수행한다.
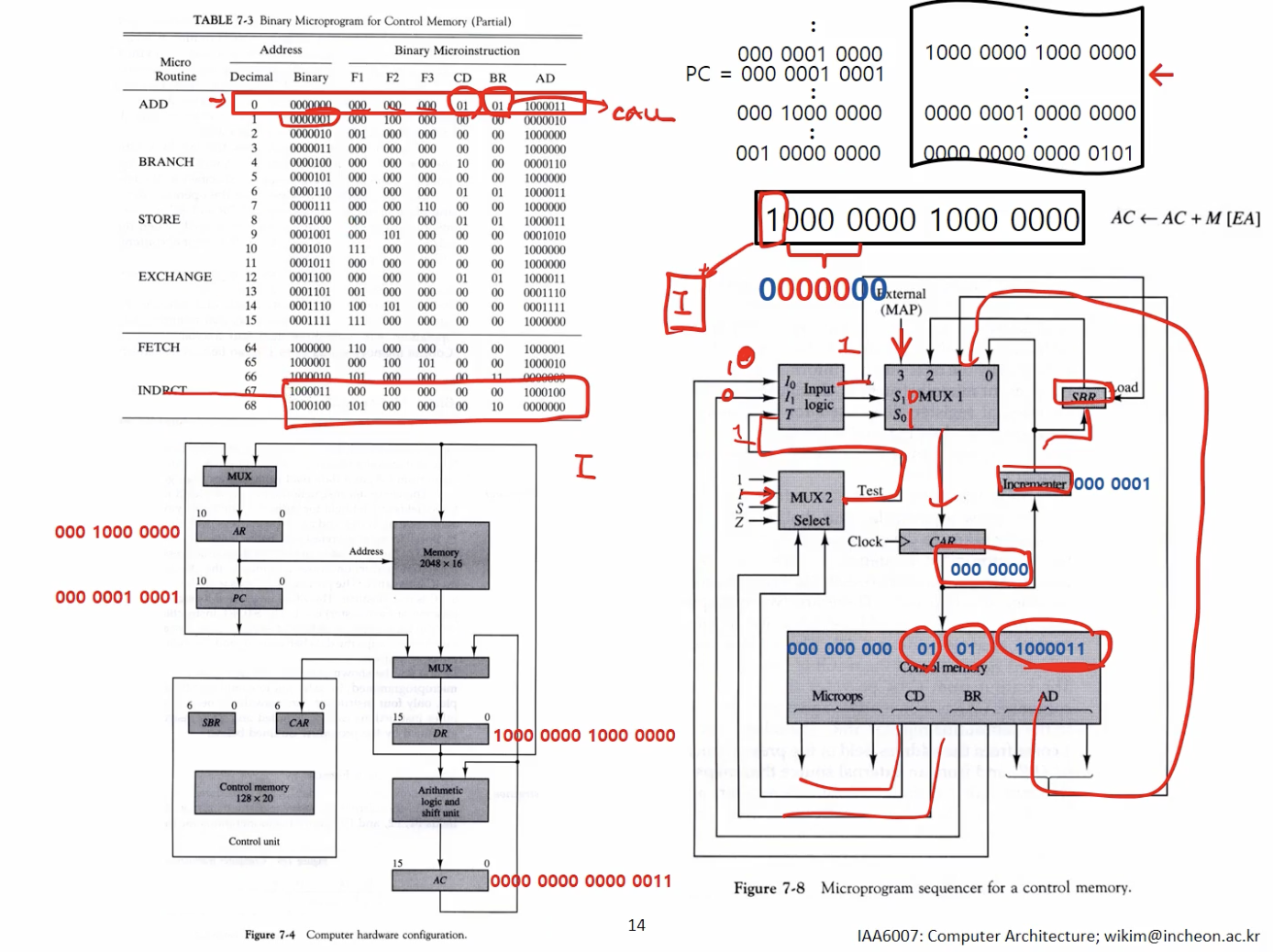
- FETCH (3) 1000010 번지의 Micro-instruction 수행
- Micro-instruction: 101 000 000 00 11 0000000
- F1, F2, F3 = 101, 000, 000
- F1 101 : AR <- DR(0-10)
- AR 에 DR 에 저장되어 있는 11-bit 의 명령어 Address field를 가져온다
- CD = 00, BR = 11
- BR 의 11 은 Mapping.
- Mapping: 명령어의 4-bit 로 구성된 Opcode 부분을 7-bit 로 변환하여 CAR 에 저장.
- Opcode = 0000
- 앞에 0, 뒤에 00 삽입
- 0 0000 00 = ADD 명령어
- AD = 0000000
- 실제 명령어 (ADD) 수행
- Micro-instruction: 000 000 000 01 01 1000011
- CD = 01
- I bit 참조 (I = 1인지 0인지)
- 현재 I bit = 1
- BR = 01
- Call
- Return Address 저장.
- 현재 0000000 에 존재하는 명령을 수행 중이므로 Return Address 는 다음 수행할 명령어가 있는 0000001 이 된다.
- 이는 CAR(0000000) 에 연결되어 있는 Incrementer 에 의해 CAR 값이 1 증가(0000001) 되어 SBR 에 저장됨으로서 수행.
- AD 로 JUMP.
- AD = 1000011
- 따라서 1000011(67) 번지로 점프하여 해당 Micro-instruction 을 수행한다.
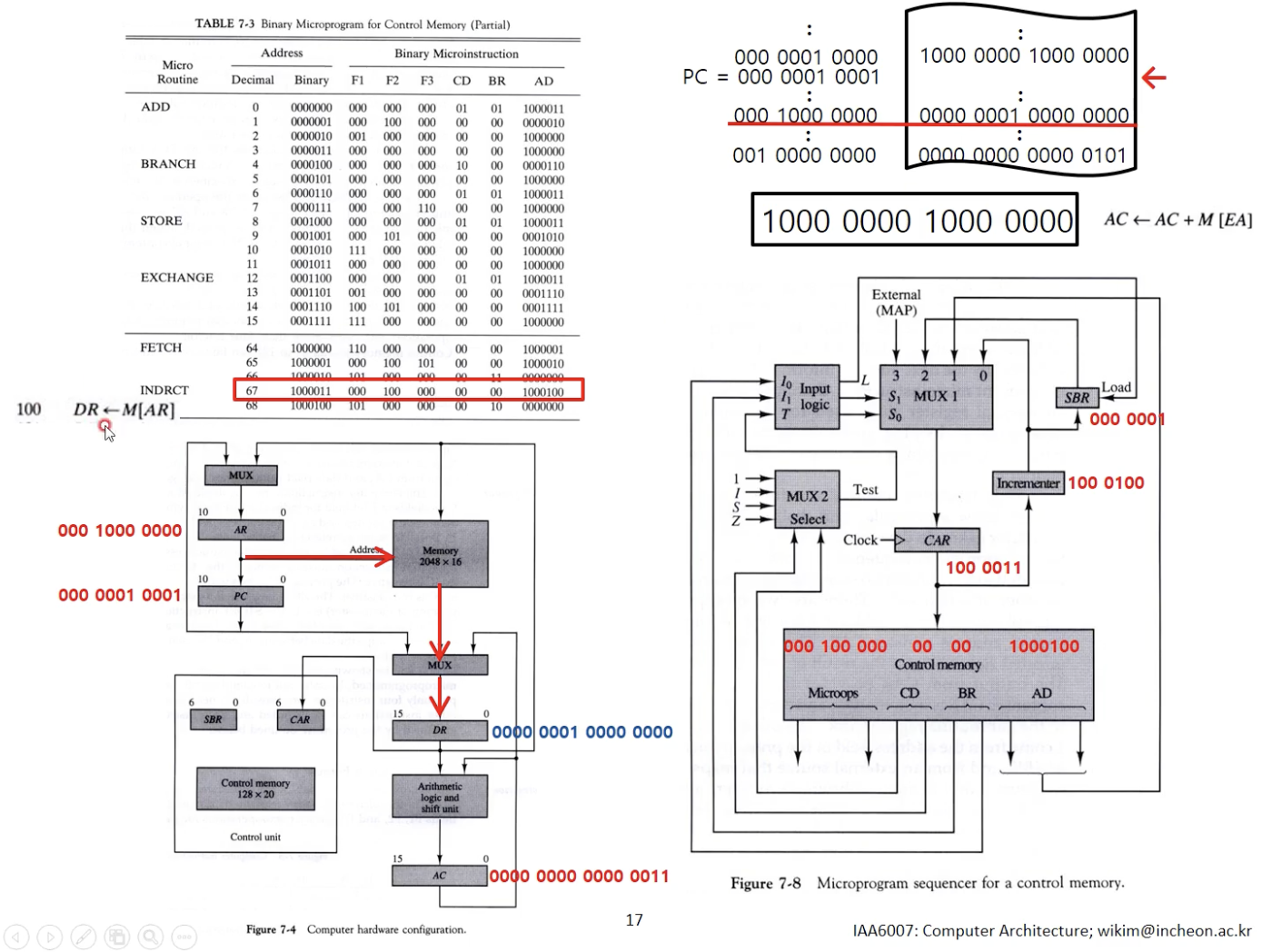
- INDRCT (1000011, 67)
- 현재 Indirect 주소를 참조하였으므로 실제 유효 주소로 Jump.
- Micro-instruction(INDRCT 1): 000 100 000 00 00 1000100
- F2 100 (Read) : DR <- M[AR]
- 유효 주소를 DR 에 가져온다.
- CD = 00, BR = 00
- AD = 1000100 으로 Jump.
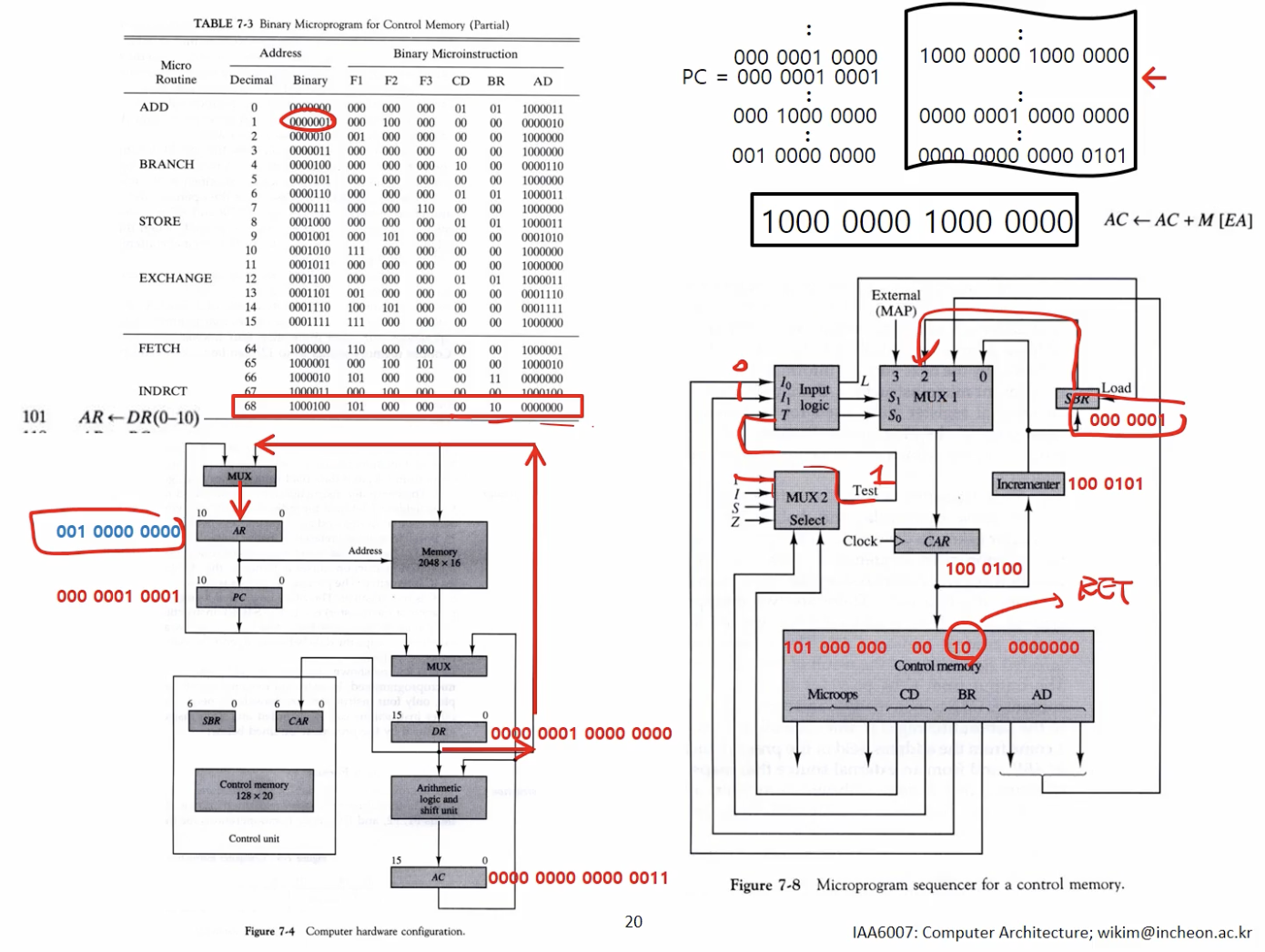
- Micro-instruction(INDRCT 2): 101 000 000 00 10 0000000
- F1 101 : AR <- DR(0-10)
- CD = 00
- BR = 01 (Return)
- Unconditionally Return
- SBR 에 저장되어 있는 주소(0000001)를 CAR 에 가져와 해당 주소로 돌아간다.
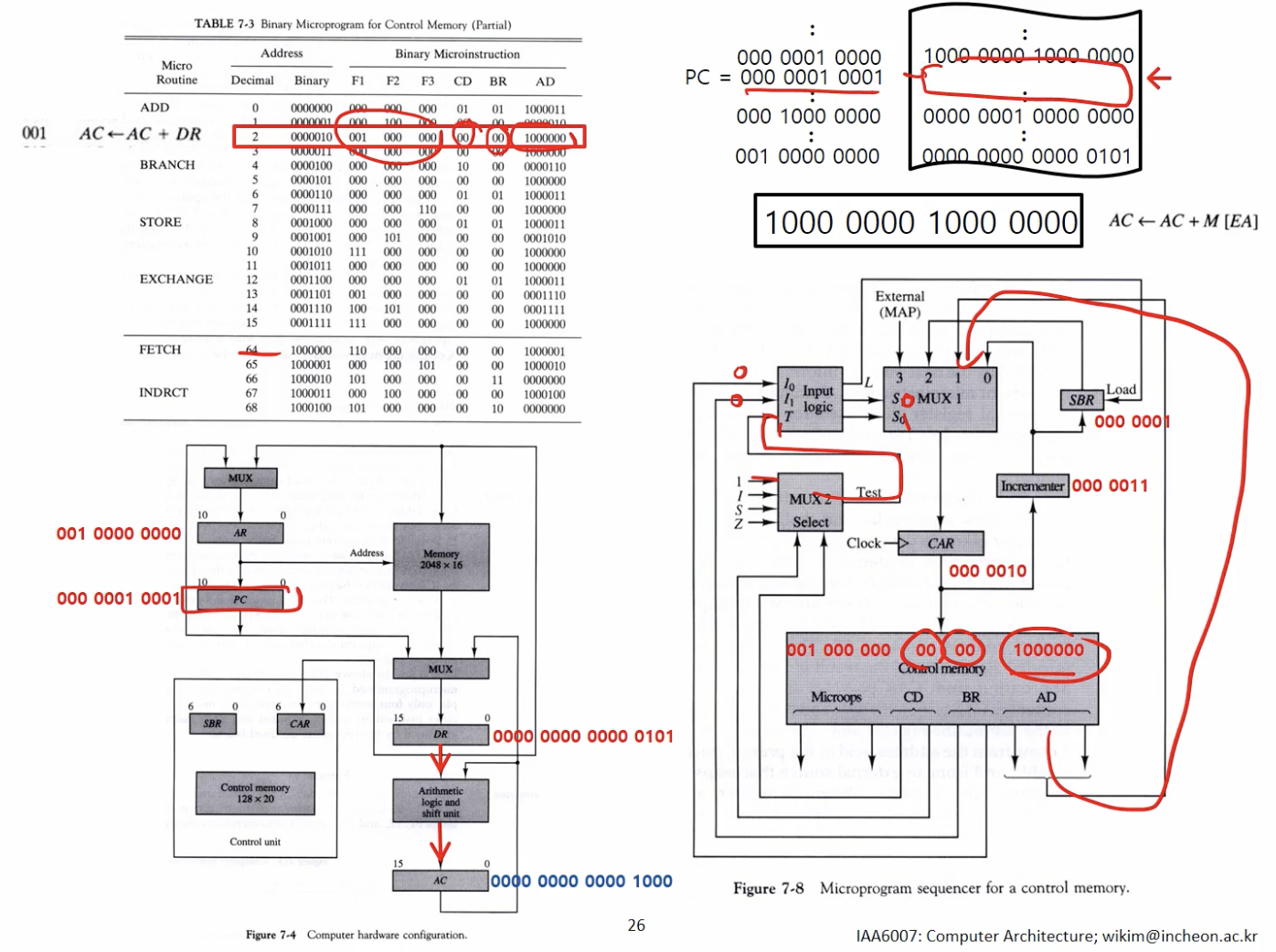
- ADD 연산 수행 (0000001)
- Micro-instruction(ADD 1): 000 100 000 00 00 0000010
- F2 100 (Read) : DR <- M[AR]
- M[AR(001 0000 0000)] = 0000 0000 0000 0101 (=5)
- CD, BR = 00 , AD = 0000010
- Unconditionally Jump Next (0000010)
- Micro-instruction(ADD 2): 001 000 000 00 00 1000000
- F1 001 (ADD) : AC <- AC + DR
- CD, BR = 00, AD = 1000000 (64 = FETCH)
- Unconditionally Jump to FETCH
- ADD 연산을 수행 후 다시 FETCH 로 돌아가 다음 명령 수행 준비를 한다.
지식 공유 및 기록을 위한 컴퓨터 구조 개인 학습 포스트입니다. 피드백은 항상 환영합니다! 긴 글 읽어주셔서 감사합니다.
Task Lists
- Micro-programmed Control 예시
- 1. Micro-program 분석
- 2. Micro-program 명령어 수행 과정
- 3. FETCH 단계부터 명령어 수행 과정



Comments